-
Measuring ranges
-
0.2-200 N·m
-
Accuracy Class
-
0.25%
-
Speed/Angle Measurement
-
–
-
Mechanical Connection
-
Cylindrical shaft
-
Suitable Coupling:
-
0.2..2 N·m
-
0.2..20 N·m
-
50..200 N·m
As introduced the slip ring method in rotating torque transducer principle, there has a number of disadvantages of using this method for high speed torque measurements. Firstly, the brushes and the conductive bands are prone to wear and tear. Periodical maintenance is required to replace theses wear components. Furthermore, the interaction of the band and the brushes produces drag torque which causes the error when measurements need to be highly accurate. Another disadvantage of the slip ring method is there can be significant levels of noise in the electrical signals being transmitted under high speed rotation. In order to overcome the wear issue of physical contact between the brushes and the conductive band, the use of contact-free technologies, such as rotary transformers, infrared devices, and SAW is devised.
Rotary Transformers use a rotary transformer coupling to transmit power to the rotating sensor. An external instrument provides an AC excitation voltage to the strain gauge bridge via the excitation transformer. The sensors strain gauge bridge then drives a second rotary transformer coil in order to get the torque signal off the rotating sensor. Specialized signal conditioning is required.
Infrared (IR) Torque sensors similarly use a rotary transformer coupling to transmit power to the rotating sensor. The difference is the rotary transformer coupling is used to power a circuit on the rotating sensor. Then the circuit provides excitation voltage to the sensor’s strain gauge bridge, and output digital signals. The digital output signal is transmitted via infrared light, to stationary receiver diodes, where another circuit checks the digital signal for errors and converts it back to an analogue voltage.
Since the sensor’s output signal is digital, it is much less vulnerable to noise from such sources as electric motors and magnetic fields. Unlike the rotary transformer system, an infrared transducer can be configured without bearings as a true maintenance free, non-contact, no drag sensor.
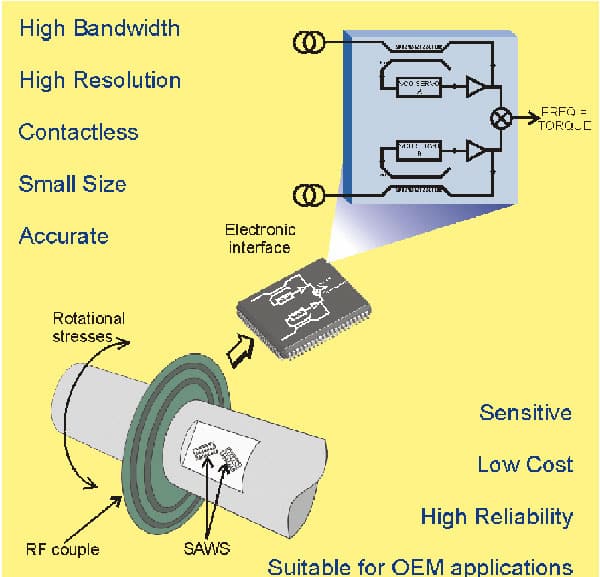
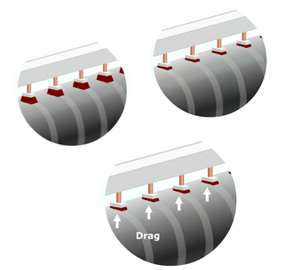
Surface Acoustic Wave (SAW) torque sensing is an emerging technology for wirelessly sensing and transmitting values of torque. SAW torque transducers are resonators attached to the shaft that have a resonant frequency that changes with applied torque. These passive devices can be excited with an applied electromagnetic interrogation pulse. The strain on small SAW devices as the shaft twists can be read wirelessly by a receiver that senses the resonant frequency and calculates the torque.